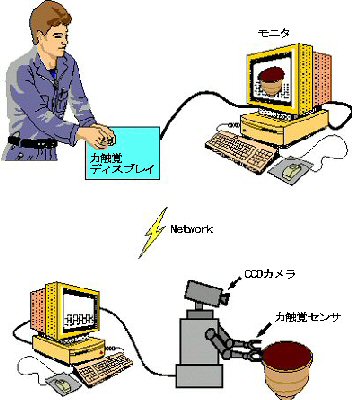
人間が操作する,人間に教示する,人間を計測する,人間に伝達するなど,ロボット工学,メカトロニクス,バーチャルリアリティ,制御工学等をベースに人間と関係の深いテーマについて研究を行う.
- 受動歩行メカニズムの解明と受動歩行機の開発 受動歩行の写真・動画
- 遠隔操作およびスケーリングに関する研究
- 切り替えや非線形性を含む系の制御
- マイクロドームインタフェース
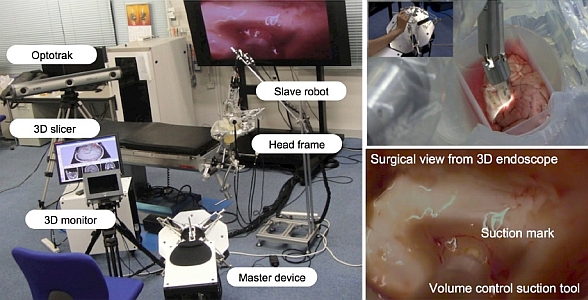
○ インテリジェント手術機器研究開発
医師と共同のもと脳神経外科用インテリジェント手術機器の 開発を行っています.脳腫瘍摘出手術では腫瘍提出率を向上が手術後の治療成績に大きく貢献することが知られています.
そこでセンサ技術,情報処理技術と紹介したロボット技術を融合させることで治療と診断と一体化した 残存腫瘍ゼロ手術を目指した開発を行っています.
ロボットの動画などはこちらをご覧下さい.
○ 教育・訓練システム
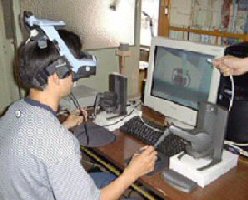
手術などの医療行為には,多くの専門知識と共に高度な技術・手技が要求される.技術の習得には,視聴覚情報のみでなく,力触覚や動作を伴う訓練が必要である.人体や動物などの生体を用いることなく,また繰り返し訓練を行うために,ロボット工学やバーチャルリアリティを利用した力触覚を有する臨場感の高い教育訓練システムを開発する.
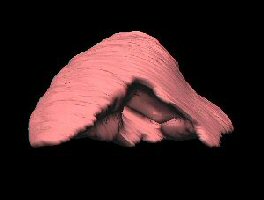
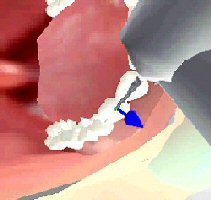
- マイクロドームを用いた外科手術訓練システム
- 生体組織のモデリングと操作
- 歯科治療訓練システム
- 車いす体験・訓練システム
○ 手術・動作支援
外科手術は高度化,低侵襲化が進み,人間が直接目で見えないような微細手術や,直接操作できない遠隔手術が用いられている.これらの手術を支援するために,計測技術やバーチャルリアリティを応用したナビゲーションシステムの開発,ロボット工学,遠隔操作技術を用いた手術支援システムの開発,およびそのスケーリングや制御手法について研究を行う.
また,福祉分野においても,情報計測機器を用いたナビゲーションシステムや,人に優しい移乗,動作支援機器の開発を行う.
- ソフトフィンガを用いた力触覚センシング
- 拡張現実感を用いた遠隔力覚縫合
- ウェアラブル運動支援システム
- 歩行支援システム
|
 |
 |
 |
 |
○ 伝統技能の保存・伝承
高度な職人の技能は,これまで人間から人間へと受け継がれてきた.ここに計測技術,バーチャルリアリティ,ロボット工学を応用することで,陶芸を始めとする伝統技術の解明,デジタル化による技能の保存,さらに力触覚を用いた技能伝承方法を開発する.
- 陶芸技術の3次元計測・映像化
- デジタルマイスターの3Dモデル化
- 力触覚情報の計測と可視化
|
 |
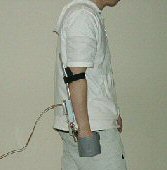
○ 陶芸の体験普及
ロボット工学,バーチャルリアリティを利用し,粘土やろくろを用意しなくても遠隔地から陶芸を体験できる高臨場感陶芸システムを開発し,陶芸の普及を図る.また,バーチャル粘土や陶芸ロボットを開発し,だれでも,どこでも,いつでも体験できる新しい陶芸の形を模索する.
- 遠隔高臨場感陶芸体験システム
- バーチャル粘土,陶芸ロボットシステム
|
 |
藤本研のホームページへ