 |
|
 |
|
In our lab, we carry out various projects on medical engineering such as
development of training system of medical education and surgical operation
support system by applying the technologies of robotics, mechatronics,
virtual reality, control engineering, computer engineering, human interface,
human engineering, and sensing engineering. Moreover, Medical Engineering
Lab was established cooperated with a regional medical school and its aims
are to raise funds for projects, create a new industry, and set up a global
base by the medical engineering research projects collaborated with some
enterprises.
Technical seeds: Tele-operation, Force-tactile-sensing display, Deformation
simulation of soft object, Solid display |
|
 |
|
 |
|
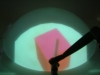
Micro-Dome Display
A dome-shaped backward projection display was developed. Solid vision can
be realized by using crystal liquid shutter goggles together with head
tracker. An object in the dome can be manipulated instinctively by using
virtual tool. This device can be used for surgical operation training system
and surgical operation support system.

 |
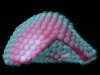
Force-tactile-sensing Display
A soft finger (force tactile sensor) that can detect sense of slipperiness
was developed by modeling human fingers. A soft sensor can be realized
by combining spring, silicon gel, and silicon rubber. Displays for slipperiness, flexible object, friction, etc. using ultrasonic
oscillator were developed. Displays for slipperiness, flexible object, friction, etc. using ultrasonic
oscillator were developed.  |
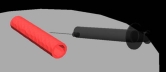
Tele-operation System using Master-Slave
Using robot hand equipped with soft-finger-sensor and master robot with
ultrasonic display of slipperiness, a master-slave system that can transmit
slipperiness was developed and this system is considered to be applied
to surgical operation.Also,  network tele-operation system and tele-observation system for medical instruments
using a cellular phone were developed. network tele-operation system and tele-observation system for medical instruments
using a cellular phone were developed.
  |
|
Force Simulation of Deformation of soft object
This is the simulation that realizes deformation, amputation, and prick
of living soft object such as internal organs or muscles. It can calculate
deformation and force of the object when it is manipulated in real time.
It divides the object into minute element, and gives them characteristic parameter and boundary condition,
and uses finite element model. minute element, and gives them characteristic parameter and boundary condition,
and uses finite element model.
  |
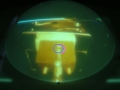
Virtual Surgical Operation Training System
With deformation force simulation using micro-dome display, force-display
device (PHANToM), and finite element model, virtual surgical operation
training system was constructed. By manipulating interactively the soft
object that is displayed stereographically with feeling reaction force,
training for basic skills of surgical operation and image training for
doctors before operation can be realized. By using virtual training system,
training of various situation can be done repeatedly and effectively.
  |
Training Simulator for Dental Treatment
A simulator for training to use a dental instrument for drilling teeth
was developed. Since to obtain delicate force sense called feather-touch
that is essential to drill teeth requires repeated practice, feedback and
visibility of force is possible with this simulation. Moreover, by reflecting
 unexpected motion of a patient and bloodshed in case of cutting tongue,
higher presence compared with conventional manikin is realized. unexpected motion of a patient and bloodshed in case of cutting tongue,
higher presence compared with conventional manikin is realized.
  |
|
Besides above researches, various researches on medical engineering, robotics,
practice of traditional art skills, etc. are carried out. For particulars
of FUJIMOTO lab, projects on medical engineering research, Medical Engineering
Lab, etc., please apply to the address below.
Inquiries and Application:
Hideo FUJIMOTO
Professor of Omohi-College
Graduate School of Engineering Nagoya Institute of Technology
TEL: 052-735-5330, E-mail: fujimoto.hideo@nitech.ac.jp
URL: http://www.mech.nitech.ac.jp/~fujimoto/fujimoto_lab.html
|


 A simulator for training to use a dental instrument for drilling teeth
was developed. Since to obtain delicate force sense called feather-touch
that is essential to drill teeth requires repeated practice, feedback and
visibility of force is possible with this simulation. Moreover, by reflecting
unexpected motion of a patient and bloodshed in case of cutting tongue,
higher presence compared with conventional manikin is realized.
A simulator for training to use a dental instrument for drilling teeth
was developed. Since to obtain delicate force sense called feather-touch
that is essential to drill teeth requires repeated practice, feedback and
visibility of force is possible with this simulation. Moreover, by reflecting
unexpected motion of a patient and bloodshed in case of cutting tongue,
higher presence compared with conventional manikin is realized.