|
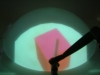
マイクロドームディスプレイ
ドーム(半球)形の背面投影ディスプレイを開発.液晶シャッターメガネおよびヘッドトラッカーを併用して立体視を実現.バーチャルツールを用いることで,ドーム内の物体を直感的に操作することが可能.手術訓練システムや,手術支援システムで利用.


 |
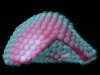
力触覚センシング・ディスプレイ
人間の指をモデルとし,すべり感覚を検出可能なソフトフィンガ(力触覚センサ)を開発.ばね,シリコンゲル,シリコンゴムを組み合わせ,柔らかいセンサを実現.
また,超音波振動子を利用 したすべり感覚ディスプレイや,柔軟物提示ディスプレイ,摩擦提示ディスプレイ等も開発している. したすべり感覚ディスプレイや,柔軟物提示ディスプレイ,摩擦提示ディスプレイ等も開発している.
  |
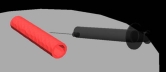
マスタ・スレーブ遠隔操作システム
ソフトフィンガセンサを備えたロボットハンド,および超音波すべりディスプレイを備えたマスタロボットを用いて,すべり感覚を伝達可能なマスタ・スレーブシステムを開発し,外科手術への応用を検討している.
また,ネットワーク遠隔操作システムや,携帯電話を用いた医療機器の遠隔監視システムなども開発している.
  |
|
柔軟物変形力覚シミュレーション
臓器や筋肉などの生体柔軟物の変形,切断,穿刺を実現するシミュレーション.操作が加わった際の変 形および力覚を実時間で計算. 形および力覚を実時間で計算.
対象物を微小要素に分割し,特性パラメータおよび境界条件を与え,有限要素モデルを利用.
  |
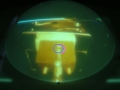
バーチャル外科手術訓練システム
マイクロドームディスプレイ,力覚提示デバイス(PHANToM),および有限要素モデルを用いた変形力覚シミュレーションを利用し,バーチャル外科手術訓練システムを構築.
立体的に表示された柔軟対象物を,反力を感じならインタラクティブに操作することで,基礎的な手術手技の訓練や,医師が術前に行うイメージトレーニングなどを実現.
バーチャル訓練システムを用いることで,様々な状況を繰り返し効果的に訓練可能.
  |
歯科治療訓練シミュレータ
歯を削る時のドリルの使い方を訓練するためのシミュレータを開発.歯を削る際に必要なフェザータッチと呼ばれる微妙な力感覚は反復練習が必要なため,力覚のフィードバックおよび可視化が可能なシミュレータ.
さらに,患者の予期せぬ動きや,舌などを切開してしまった際の流血を反映させ,従来のマネキンよりも高い臨場感を実現している.
  |


 マスタ・スレーブシステムを用いた微細手術のスケーリング効果の検証.スケールの異なるマスタ・スレーブシステムを用いて,微細作業を拡大して行う際の,操作効率・操作精度,作業効率・作業精度について実験的に検証している.
マスタ・スレーブシステムを用いた微細手術のスケーリング効果の検証.スケールの異なるマスタ・スレーブシステムを用いて,微細作業を拡大して行う際の,操作効率・操作精度,作業効率・作業精度について実験的に検証している.